


Il progetto del robot chirurgo spaziale è finanziato dall’agenzia spaziale statunitense e guidato da ricercatori dell’università del Nebraska e della startup Virtual Incision


Centomila dollari per testare un robot che “taglia e cuce” come un chirurgo nella Stazione spaziale internazionale (Iss). Li ha dati la Nasa all’università del Nebraska-Lincoln e alla startup Virtual Incision, che da circa 20 anni lavorano all’idea di un minuscolo robot chirurgico chiamato Mira, acronimo di miniaturized in vivo robotic assistant. Con questo finanziamento, i ricercatori dovranno rendere il robot adatto al volo spaziale in vista di una missione di prova nel 2024.
Mira non è nato con l’idea di essere utilizzato nello spazio, ma come strumento chirurgico di frontiera nell’assistenza durante gli interventi. Presenta infatti due vantaggi chiave: in primo luogo, può essere inserito attraverso una piccola incisione, consentendo ai medici di eseguire interventi chirurgici addominali (come la rimozione dell’appendice, ad esempio) in modo poco invasivo. Si è dimostrato efficace, durante test precedenti, per eseguire resezioni del colon. In secondo luogo, la tecnologia potrebbe consentire ai chirurghi di lavorare a distanza, per esempio rimuovendo le schegge di un soldato ferito da un ordigno esplosivo o, appunto, per eseguire piccoli interventi sul corpo di un astronauta in missione su Marte.
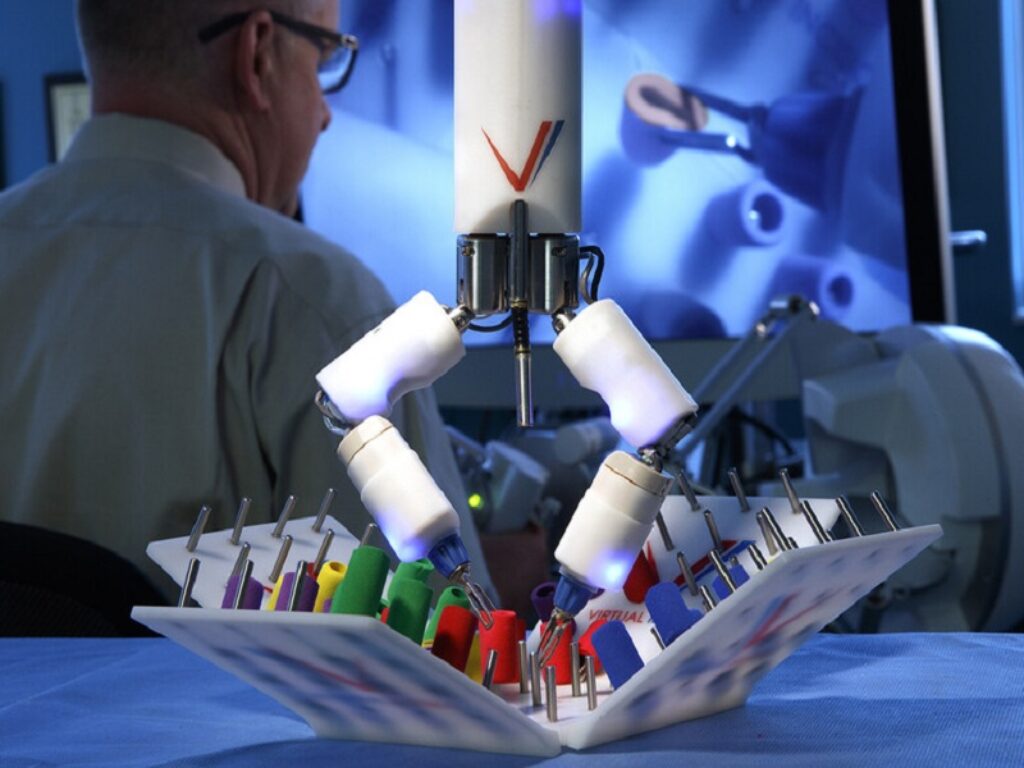
Il comando a distanza è stato testato da un astronauta della Nasa in pensione, Clayton Anderson, che ha preso i comandi del robot mentre si trovava al Johnson Space Center di Houston, e ha pilotato Mira facendogli eseguire operazioni simili a quelle chirurgiche in una sala operatoria a quasi 1500 chilometri di distanza, all’Università del Nebraska. Per quel che riguarda la possibilità di utilizzarlo nello spazio, nel corso del prossimo anno gli scienziati e ingegneri che lavorano al progetto scriveranno il software e configureranno Mira per inserirlo in un contenitore per esperimenti della Stazione spaziale e testeranno il dispositivo per assicurarsi che sia abbastanza robusto da sopravvivere al lancio, e che i suoi sistemi funzionino come previsto nello spazio. Dovranno poi aspettare circa un anno prima che arrivi il turno del robot a bordo della Iss.
Sulla Stazione spaziale, il dispositivo sarebbe programmato per funzionare autonomamente e per risparmiare la larghezza di banda dedicata alle comunicazioni. L’astronauta non dovrà far altro che premere un interruttore di avvio che consenta al robot di eseguire il proprio lavoro. L’esperimento dovrebbe durare solo due ore, al termine delle quali l’astronauta premerà nuovamente l’interruttore per spegnerlo.
Se tutto funzionerà a dovere, sarà l’operazione più autonoma che il robot abbia mai svolto. Secondo i calcoli, però, Mira non sarà davvero pronto a lavorare in piena autonomia prima di 50-100 anni, quando la Stazione spaziale internazionale non ci sarà più ma, forse, avranno già avuto inizio le lunghe missioni spaziali verso Marte o sulla Luna. L’obiettivo di questo primo test, quindi, non è il raggiungimento dell’autonomia, ma la messa a punto del funzionamento del robot a gravità zero.